
Group project in which we designed and fabricated a Rube Goldberg-esque marble run
Skills: CAD, (CNC) Mill, Lathe, FDM 3D Printing, CNC Router, Laser Cutter, Circuitry

The first team project in Mechanical Prototyping was to create a visually interesting kinetic sculpture driven by a DC motor. In addition to size constraints, the main requirement was to use a variety of mechanisms and manufacturing techniques. Our group decided to go with a marble run where the ball is slowly lifted up to the top through a variety of mechanisms and then rapidly drops back down. We found this interesting because it increased the complexity of the integration of the different components as the ball had to have a smooth travel.

My primary responsibility on the team was the design and manufacture of the stair steps. In this design there is a static stair and a moving stair that oscillates up and down alongside. The marble rolls back and forth and advances forward and up as the moving set of steps travels up and down. I designed this motion to be produced using a scotch yolk and verified that the concept would work with a quick FDM printed model.

For the actual sculpture we decided to use 1/2'' steel balls as our marbles, so each stair step needed to be at minimum 1/2'' wide. I designed the assembly to use two sets of steps made from 3/8'' plywood separated by a 1/4'' aluminum plate which also enclosed the cam for the scotch yolk.

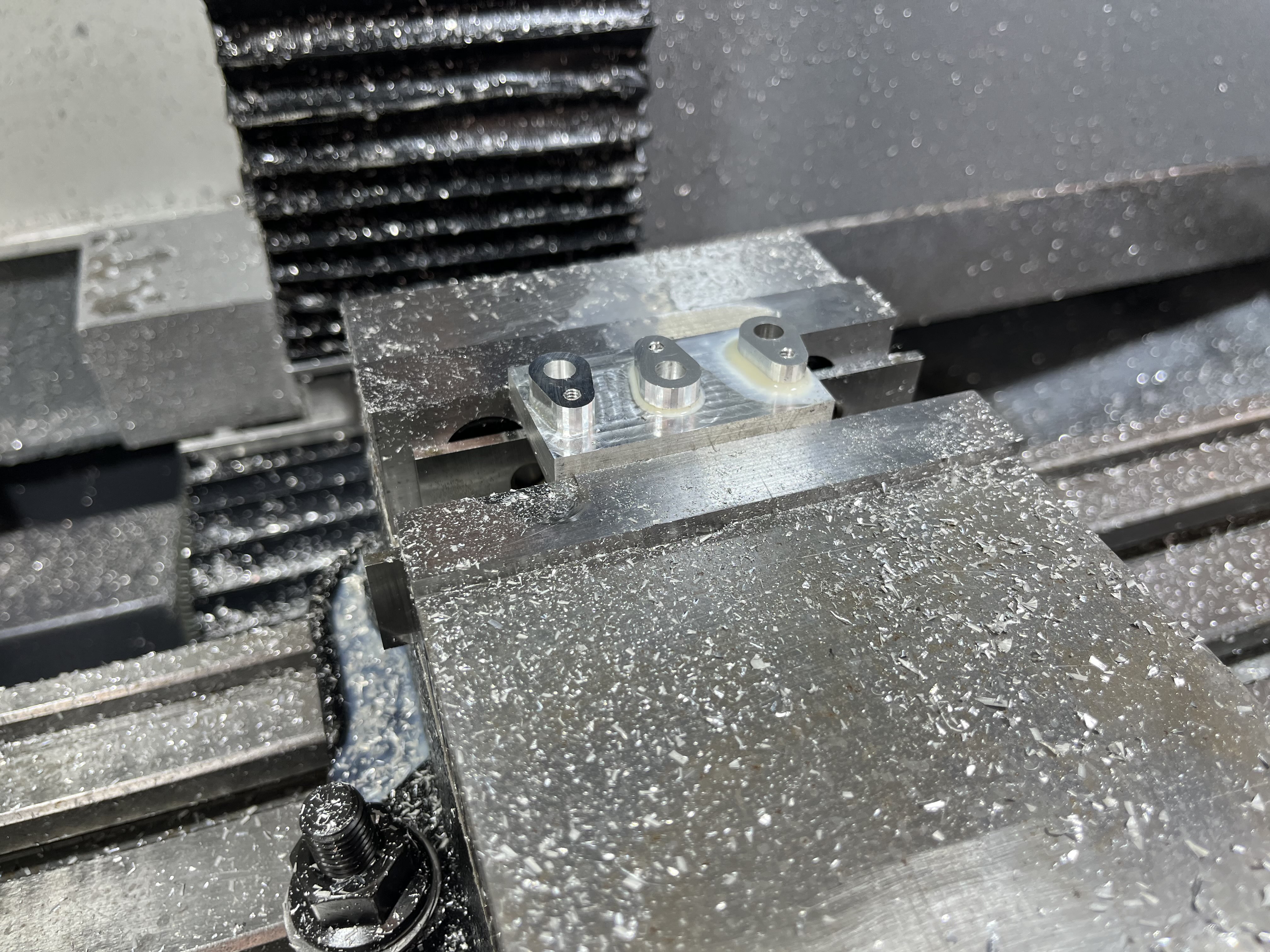
As the waterjet was out of service, I used the Tormach CNC to mill out a set of cams. I then machined the aluminum spacer plate on the manual mill and used the 2.5 axis CNC conversational to program the large hole that the cam sits in. The delrin standoffs that slide up and down in the slots were made on the lathe.

The steps were manufactured on the ShopBot. Even using a compression endmill the ShopBot was causing significant tearout in the plywood. This was slightly improved my mirroring the pieces so that the visible face was on the bottom during the machining, although the finish was still not satisfactory. The slots were also slightly undersized which led to significant friction restricting the movement even after they were post-processed with a file.

.jpg)
In the end I decided to laser cut the wooden components and FDM 3D printed top steps to widen the 1/4'' plywood. I laser cut acrylic railings to ensure that the marble wouldn't fall off the outer edge. This worked significantly better and was also more visually appealing.

While my primary work was in designing and manufacturing the stairs, I also notably contributed to the design of the box and belt tensioner system as well as the electronics. Pictured below is the rear enclosure of the box along with the electronics.

One challenge that I had during this project was the inaccuracy of the ShopBot. For larger things like the box this was fine after a bit of filing, but not for the stairs. I solved this by redesigning the stairs to use laser-cut plywood instead, which allowed me to get tighter tolerances. The ball still sometimes fell off the front of the stairs, which I solved by adding the acrylic railings. Another challenge that I had was maintaining tension on the belt system. I solved this by adding an idler on a slot, which could be adjusted to add tension and then the bolt tightened down to hold the system in place. I had originally planned to waterjet and then post-process the staircase aluminum components on the mill, I had to look to other methods as the waterjet was out of service. This took more time, although I am very glad that I did have to do so as I gained more practice using the Tormach and 2.5 axis conversational CNC. While there were significant challenges along the way, I am pleased by the final form of the marble run.

